






This article considers the impacts of driverless cars, or autonomous vehicles, on bicycle planning and what a 'low stress' bicycle route may look like in the future.

There has been a lot of talk recently on the planning impacts of self driving cars, or autonomous vehicles as some call them. There is a recent CBC piece which summarizes many of the issues.
Although there are many planning issues surrounding self driving cars, for a moment I want to focus on bicycle planning. Here in Vancouver, creating cycle routes ‘for all ages and abilities’ has become a focus for Council. In order to do this, the focus has been on the creation of physically separated bike lanes. The design is intended to protect cyclists from the physical danger of vehicles. Or rather, the danger of people driving cars who are not paying as much attention as they should.
But an all seeing, all obeying computer driven car could presumably behave much better. It could be programmed to travel at, say, 20 kph on designed ‘low stress bicycle routes’ and be programmed to give people cycling the right of way. it could avoid certain streets altogether unless required to access a destination.
Instead of having to create separate spaces for different types of street-users because they are incompatible in some way, handing over control of vehicles to computers surely presents the opportunity for safe, low stress shared spaces. There are many planning advantages to this including narrower, more friendly feeling streets, making more efficient use of space.
We would of course have to trust the technology and this will not happen overnight. if you’re out cycling with your eight year old, do you really trust that Google powered autonomous vehicle to react in time when your child swerves out into its path?
We don’t know how the future will evolve. However, I believe it is important to start thinking through some of these scenarios so we’re better prepared as professionals and advocates when these questions and issues inevitably arise down the line.
FULL STORY: Impacts of self driving cars on bicycle planning


Planning Trends for 2025: Creative Housing Solutions, Ongoing Transit Woes, and the Ever-Creeping Tentacles of AI
Urban planners have no shortage of urgent issues to delve into, from a deepening housing crisis to an increasingly unpredictable climate to a new federal administration bent on slashing key funding for everything from electric cars to housing assistance.

Looking for the Light in a Dark Age
Professor Glenn Lyons offers insights about the challenges facing planners in times of rapid technological, cultural, and social change, in Local Transport Today's first ‘Deep Thinking Initiative’ article.

Seattle’s New Overlook Walk Offers Ample Park Space Near Pike Place Market
The elevated park and event space replaces part of the demolished Alaskan Way Viaduct, connecting the city’s famous Pike Place Market to the waterfront.
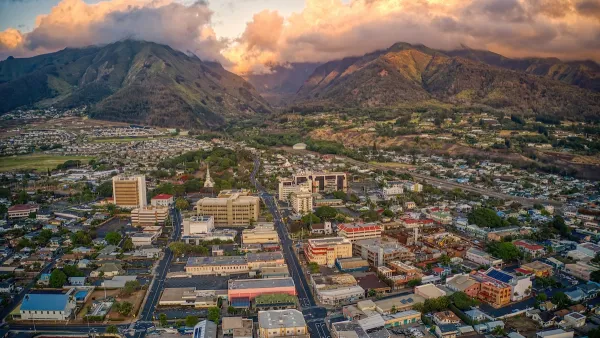
Maui's Vacation Rental Debate Turns Ugly
Verbal attacks, misinformation campaigns and fistfights plague a high-stakes debate to convert thousands of vacation rentals into long-term housing.
Planetizen Federal Action Tracker
A weekly monitor of how Trump’s orders and actions are impacting planners and planning in America.

San Francisco Suspends Traffic Calming Amidst Record Deaths
Citing “a challenging fiscal landscape,” the city will cease the program on the heels of 42 traffic deaths, including 24 pedestrians.

Defunct Pittsburgh Power Plant to Become Residential Tower
A decommissioned steam heat plant will be redeveloped into almost 100 affordable housing units.

Trump Prompts Restructuring of Transportation Research Board in “Unprecedented Overreach”
The TRB has eliminated more than half of its committees including those focused on climate, equity, and cities.

Amtrak Rolls Out New Orleans to Alabama “Mardi Gras” Train
The new service will operate morning and evening departures between Mobile and New Orleans.
Urban Design for Planners 1: Software Tools
This six-course series explores essential urban design concepts using open source software and equips planners with the tools they need to participate fully in the urban design process.
Planning for Universal Design
Learn the tools for implementing Universal Design in planning regulations.
Heyer Gruel & Associates PA
JM Goldson LLC
Custer County Colorado
City of Camden Redevelopment Agency
City of Astoria
Transportation Research & Education Center (TREC) at Portland State University
Jefferson Parish Government
Camden Redevelopment Agency
City of Claremont